[Introduction and Live Demo in Isaac Sim | Omniverse Community Stream] 강연 요약
https://www.youtube.com/watch?v=vpHR0qiH-GY
1. Introduction (릴라 project manager)
- sementic segmentation, 2d/3d bounding box, rgb deb camera 등의 ground truth data 제공
- 시뮬레이션 통해 synthetic data 얻기 쉬움
- manipulation, navigation, ros 등 다양한 로보틱스 기술에 활용 가능
2. How to Use the simulator (헤이락 Lead Engineer)
- https://developer.nvidia.com/isaac-sim
- computer requirements : rtx required, 홈페이지 doc에 나와있음.
- Launcher - editor , 터미널에서 명령 치듯이.
- 강화학습 시 벌어지고 있는 상황 볼 수 있다고 하는 듯.
- 학습 시키는 법 -> 이것을 real world로의 적용 : sim to real
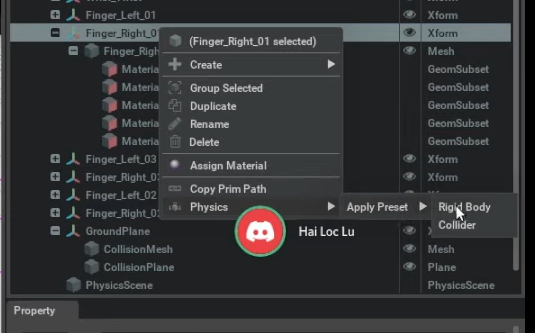
- 어떤 파트가 physics에 applied 되어 있는지 확인하는 법

- 오른 쪽 집게 부분도 적용하는 방법 알려줌
1) rigid body 설정
2) main arm에 속할 수 있도록 joint 설정해야함. : pivot point를 고려하여해야 하므로, part를 select(클릭)하는 순서가 중요하다. wrist first, finger later.


3) drive 추가 (ex motor, damping 등의 조건 추가)

4) spherical joint

- 배경 지정 가능 + 조명 설정 (dome light)
- 물체 실제같이 보이는 설정 : path-traced mode

- real robots 구동 (mirroring the real world - sim to real)


- 시뮬레이션 코드 열 수 있음



vscode로 real-time debugging 할 수 있음
- view point 변경

- ros on multiple machines
ros wiki에 나오는 거랑 똑같이 하면 된다
구동 방법:

다른 터미널에

그리고 real robot 구동
rmp example load



- synthetic data 가지고 학습 시키는 법?

